
€ 80,00
Book Overview
Welcome to RCLPY: From Zero to Hero – your comprehensive, hands-on guide to mastering ROS 2. Whether you’re just starting out with mobile robotics or want to deepen your knowledge, this book offers clear, practical guidance on everything. With no prior knowledge required, it gives you a solid foundation in the Linux shell and takes you from ROS 2 and mobile robotics basics through advanced topics such as state estimation, motion control, and service-oriented architectures using ROS 2. Get ready to build real robotic applications with step-by-step examples that bring theory to life using the Gazebo physics simulation engine!
What You’ll Learn
In this book, you’ll start by understanding the core concepts of ROS 2 – from packages, nodes and topics to services, actions, dynamic parameter management and lifecycle management. With detailed chapters on differential drive kinematics, closed-loop control, and sensor fusion, you’ll learn not only how to program robots using rclpy, but also how to tackle challenges such as state estimation using Kalman and extended Kalman filters. Each concept is paired with practical examples, exercises and solutions, and homework to reinforce your learning.
Hands-On Practice & Real-World Applications
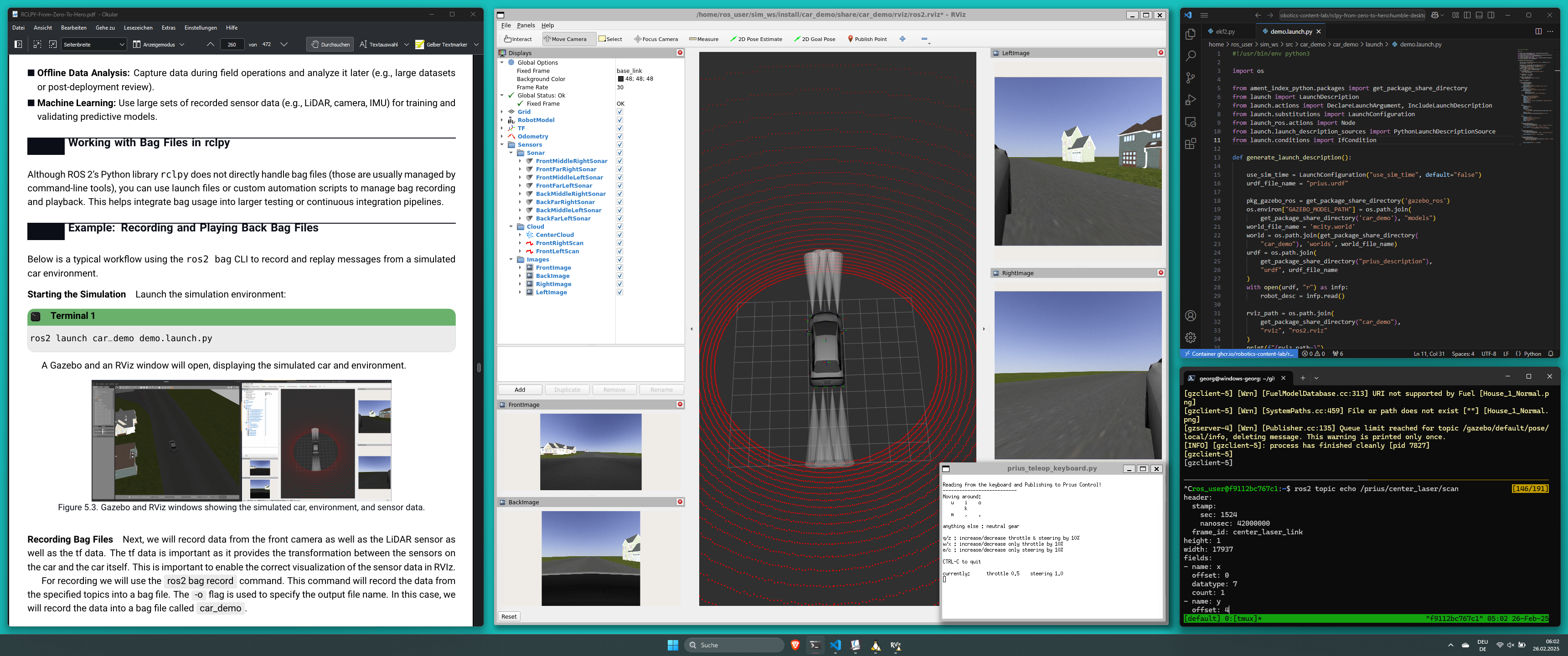
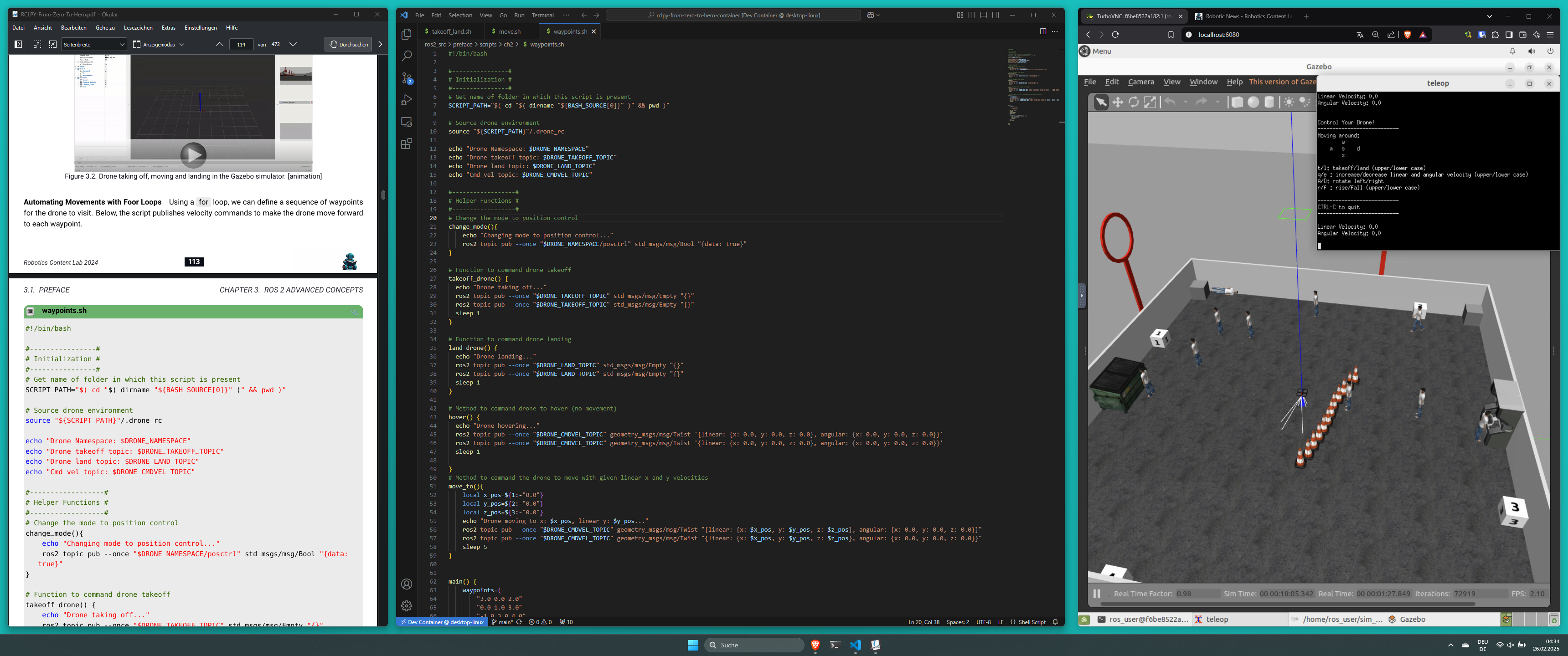
This book provides hands on experience by leveraging the Gazebo1 simulator. Here you will learn how to implement real world tasks such as odometry calculation for differential and holonomic robots, open- and closed-loop control systems, or state estimation using sensor data fusion for noisy systems. You’ll first read about those key algorithms in theory and then get to implement them in interactive projects using a fully-fledged physics simulation engine. This hands-on approach will give you the confidence to start your own robotics projects!
Empowering Your Learning with a Preconfigured Docker Container
Accompanying the book is a tailored container image2 containing all necessary ROS 2 tools, libraries and robot simulations. It’s designed to work across various platforms—be it Windows, Linux, or macOS—and supports advanced features like GPU acceleration for enhanced performance.
Advanced Topics ROS 2 Topics
After learning about ROS 2 basics, the RCLPY: From Zero to Hero takes you on a deep dive into advanced ROS 2 topics and techniques such as Multi-Threading with the MultiThreadedExecutor, broadcasting and listening to coordinate transformations using TF2, dynamic parameter updates using callbacks to fine tune algorithm performance, using ROS 2 Lifecycle Management System and more. These advanced chapters empower you to design sophisticated, responsive robotic systems ready for real-world deployment.
Empowering Your Learning with a Preconfigured Docker Container
To make your experience as smooth as possible, RCLPY: From Zero to Hero comes with a custom Docker container that serves as your all-in-one development environment. This container is preconfigured with all the essential ROS 2 tools, libraries, and simulation environments used in this book. It’s designed to work across various platforms—be it Windows, Linux, or macOS—and supports GPU acceleration for enhanced performance.
Here’s why this is a game changer:
1 Gazebo classic is used for convenience. ROS 2 related code is still valid.
2 Supported OS:
Tier 1: Linux
Tier 2: Windows 10/11, macOS Intel
Tier 3: macOS Silicon
3 Extensions are only preconfigured for Visual Studio Code
Please note that this product is only for organizations / companies. For private customers please use the following product: RCLPY – From Zero to Hero
Please note that each PDF purchase will include an invisible, secure watermark that uniquely associates the file with your organization. This tag does not affect usability but ensures traceability and brand attribution. The PDF will be delivered within 24 business hours (Monday to Friady) of order confirmation via your registered company email.
Reviews
There are no reviews yet.