Welcome to the exciting world of ROS 2! Whether you’re building your first robot or scaling complex robotic systems, understanding the core concepts is crucial. This 4 part guide will walk you through the essential building blocks: setting up your ROS 2 environment understanding the structure of ROS 2 packages leveraging the powerful command-line interface […]
In ROS 2, launch files allow you to automate the startup of multiple nodes and configurations in a clean, scalable way. Launch files are often written in Python, which makes them more flexible compared to the XML format used in ROS 1. Today, we’ll go through the process of creating a basic ROS 2 launch […]
Introduction Developing applications with Robot Operating System 2 (ROS 2) can be challenging due to the complex dependencies, system compatibility issues, and collaboration hurdles that often arise. Managing consistent environments across different machines or teams is often a time-consuming process that can detract from actual development. However, by utilizing VS Code Devcontainers, you can simplify ROS […]
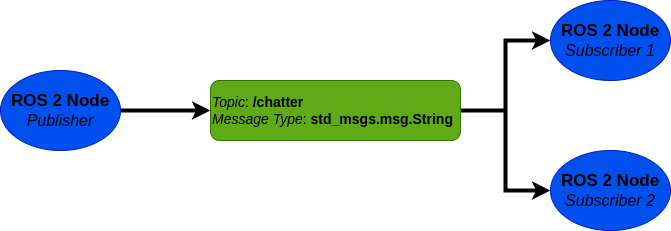
🚀 Understanding the Publish-Subscribe Mechanism in ROS 2 In ROS 2, the Publish-Subscribe (PubSub) mechanism is a fundamental communication pattern that enables nodes to communicate efficiently through topics. This post explores how PubSub works in ROS 2, its key benefits, and provides an example using the rclpy library. What is the Publish-Subscribe (PubSub) Mechanisum in […]
