What is ROSA? An Introduction to ROSA’s Role in Robotics ROSA (Robot Operating System Agent), developed by NASA’s Jet Propulsion Laboratory, is transforming human-robot interaction within ROS (Robot Operating System) and ROS 2 frameworks. By allowing natural language commands to control complex robotic functions, ROSA bridges the gap between robotic hardware and human intent, making […]
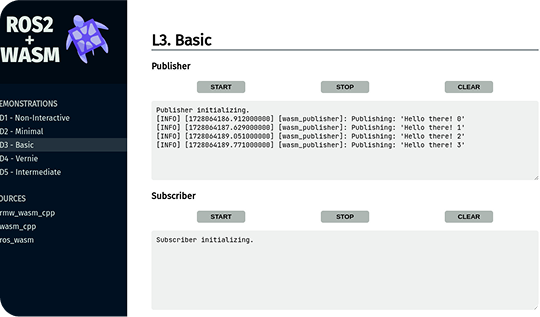
The field of robotics is witnessing an innovative leap forward with the introduction of ROS2WASM. Developed by researchers at QUT and RWTH Aachen, ROS2WASM bridges the gap between the widely-used Robot Operating System (ROS 2) and web technologies by leveraging WebAssembly. This approach allows ROS 2 applications to run directly within a web browser, eliminating […]
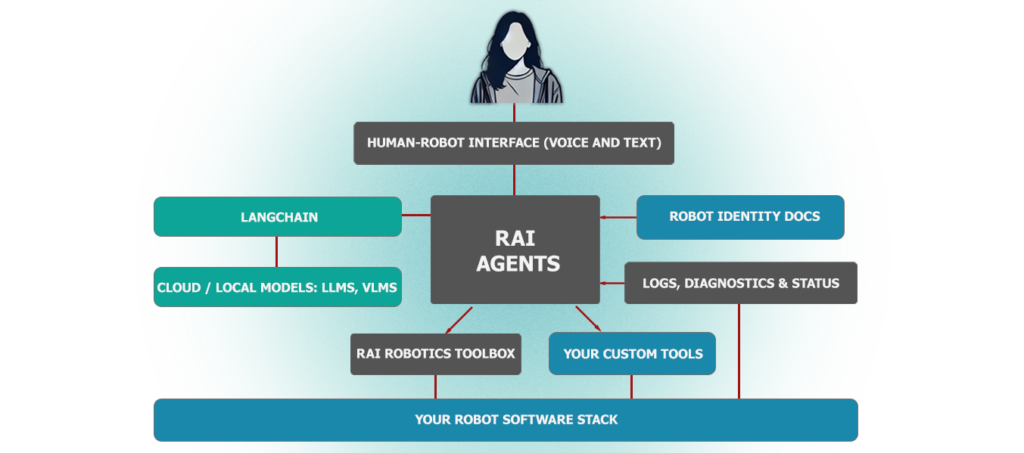
Introducing RAI: A Next-Gen AI Framework for Robots Robotics is evolving rapidly, and so are the tools that empower these machines. Enter RAI—a flexible AI agent framework by RobotecAI that introduces generative AI features to robotic systems. Currently in its beta phase, RAI is poised to provide advanced human-robot interaction, adaptive problem-solving, and a rich […]
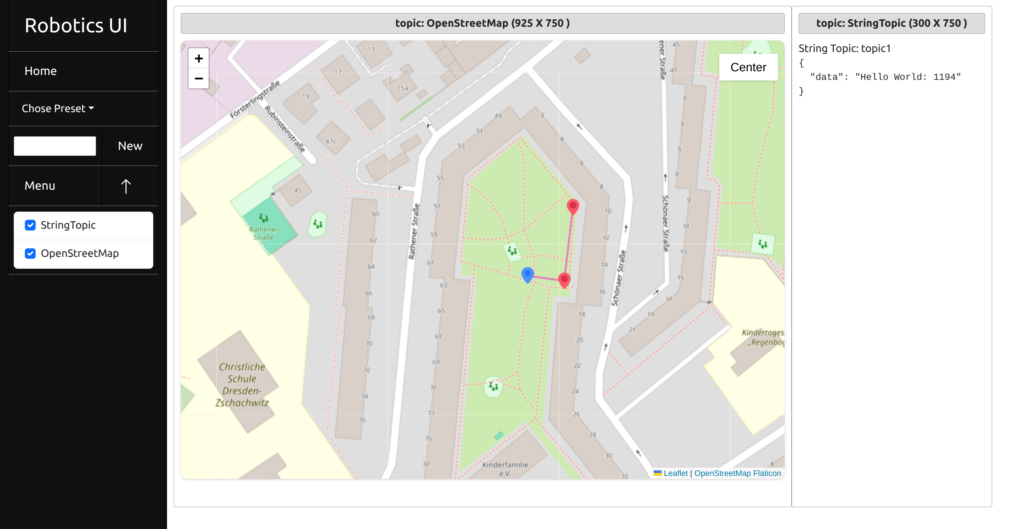
Enhancing Robot Management with the Robotics UI As the robotics field advances, so does the need for intuitive interfaces that facilitate seamless interaction between humans and machines. Sciota Robotics has introduced Robotics UI, a robust web-based solution tailored to meet the demands of ROS 2-powered robots. This platform provides developers, operators, and robotics enthusiasts with […]
