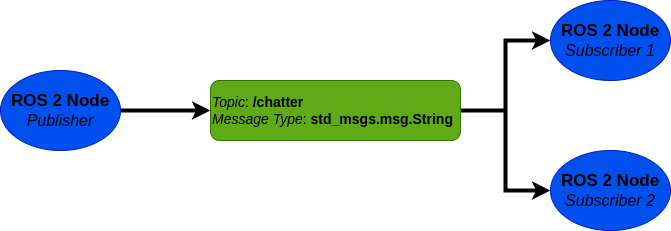
🚀 Understanding the Publish-Subscribe Mechanism in ROS 2 In ROS 2, the Publish-Subscribe (PubSub) mechanism is a fundamental communication pattern that enables nodes to communicate efficiently through topics. This post explores how PubSub works in ROS 2, its key benefits, and provides an example using the rclpy library. What is the Publish-Subscribe (PubSub) Mechanisum in […]
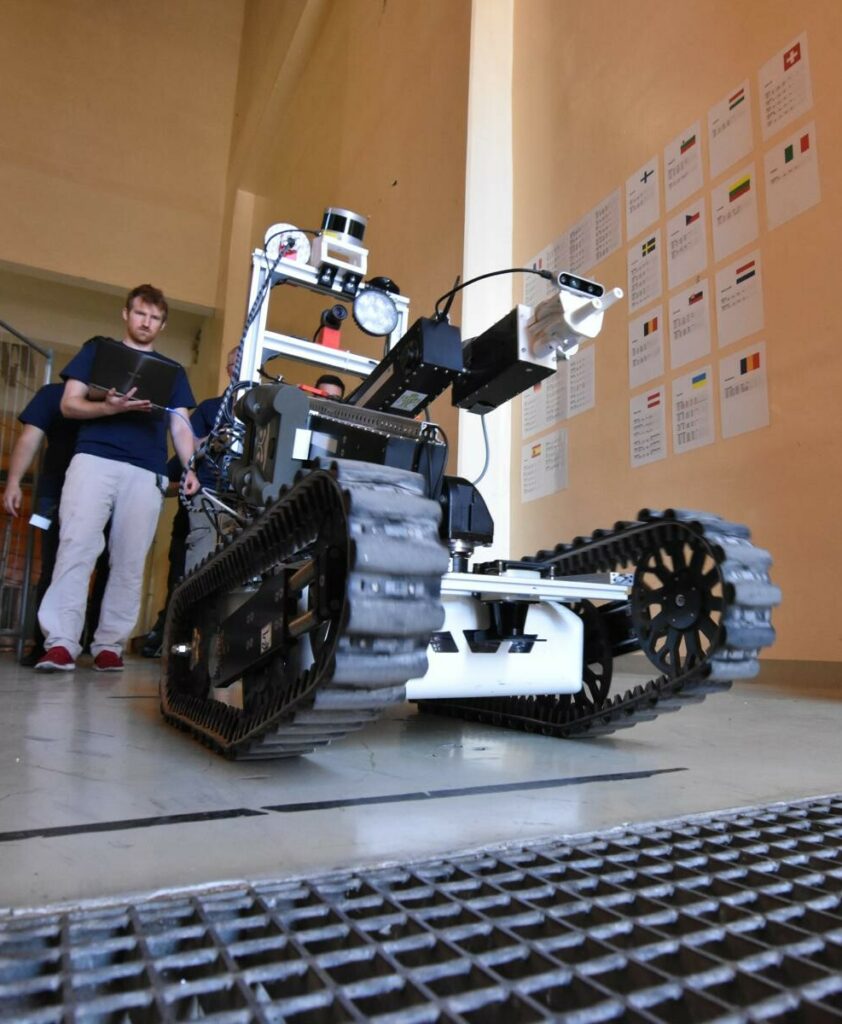
Transformative ROS Robotics: Our Milestone at EnRicH 2019 In the shadow of the dormant Zwentendorf Nuclear Power Plant, a beacon of technological advancement shone brightly as EnRicH 2019 brought together the brightest minds in robotics. This unique event, focusing on research and development rather than competition, fostered an atmosphere where innovation could thrive. Teams from […]
🚀 Hello Robotics World 👋 Hello and welcome to my blog about awesome robotics content! 🤖 I will be posting fascinating content around the topics of mobile ground-based and aerial robotics. 🚀 As we embark on this exciting journey, I’m thrilled to share with you my passion for robotics and explore the many wonders that […]
