As the robotics field advances, so does the need for intuitive interfaces that facilitate seamless interaction between humans and machines. Sciota Robotics has introduced Robotics UI, a robust web-based solution tailored to meet the demands of ROS 2-powered robots. This platform provides developers, operators, and robotics enthusiasts with the tools they need to build custom interfaces that enhance productivity and simplify robot management.
Robotics UI is more than just another dashboard tool. It’s a versatile, user-friendly interface that transforms how you monitor and control your robotic systems. With its modular design and extensive feature set, Robotics UI makes it easy to create custom dashboards that fit your specific needs—whether it’s real-time data visualization, interactive controls, or automated reporting. By supporting ROS 2 Iron, it offers compatibility with a range of applications, from research prototypes to commercial products.

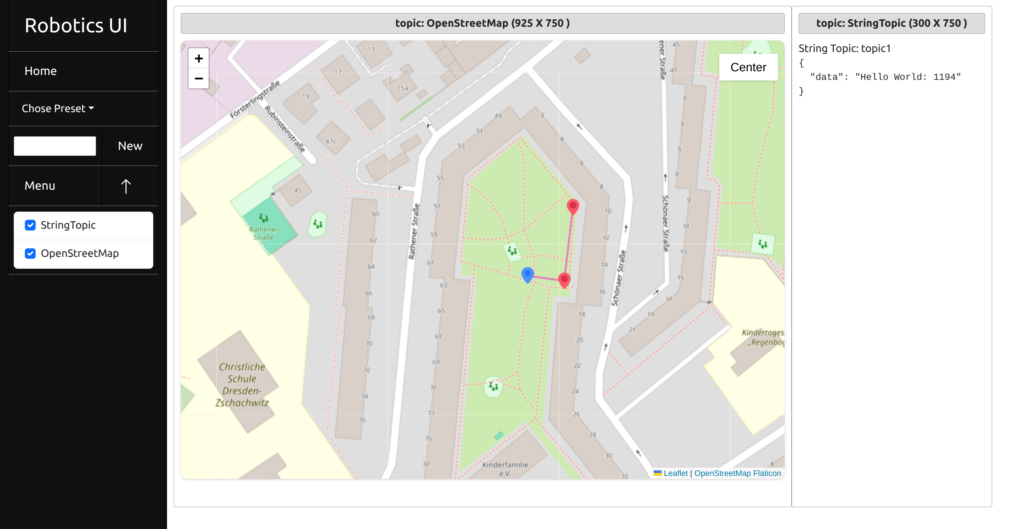
Robotics UI Interface with OpenStreetMap Plugin
Robotics UI’s most powerful feature is its flexibility. With a simple configuration using JSON files, you can design dashboards that are uniquely suited to your application. For example, if you need a panel for monitoring sensor data or a control interface for robot movement, Robotics UI can adapt to these requirements with ease. This means less time coding and more time focusing on what really matters—building and deploying your robots.
Built on ROS 2 Iron, Robotics UI connects effortlessly with your ROS 2 nodes. The platform’s backend is designed to automatically generate subscribers and publishers, which facilitates real-time data exchange and control between the interface and the robot. This tight integration ensures that you have full access to your robot’s capabilities right from your web browser.
Communicating between ROS 2 and a web interface can be complex due to the differing data formats. Robotics UI tackles this challenge by converting ROS 2 messages into JSON and vice versa. This conversion provides a streamlined method for developers to interact with their robots, simplifying tasks such as data manipulation and remote command execution.
No two robotic projects are alike, and Robotics UI’s plugin architecture reflects this diversity. From the basic widgets that display sensor readings to advanced plugins like OpenStreetMap, which enables GPS navigation for mobile robots, the platform offers a wide range of extensions. This ecosystem allows you to build interfaces that cater to specific scenarios, whether you’re developing an autonomous drone or a teleoperated robot for remote inspections.
You can find the Code at their github repository: repo ![]()
To get started with Robotics UI, you need to follow these steps:
cd ~/ros2_ws/src
git clone https://github.com/sciotaio/robotics-ui.git
cd ~/ros2_ws
colcon build --packages-select ros2_webinterfaceros2 launch ros2_webinterface webinterface.launch.pycd ~/ros2_ws/src/robotics-web/react/robotics_ui/
npm startFor more details, refer to the Robotics UI documentation.